Referensi :
Putra, Nugroho Surya Dwi., (2020). "Desain Kendali Twin Rotor Self Balancing Menggunakan Genetic Algorithm". Jurnal Teknik Elektro Vol. 09, No. 03, September 2020.
Abstrak[Kembali]
Twin Rotor merupakan gabungan 2 buah motor DC brushless yang telah dipasang propeller (baling-baling). Alat ini dapat diaplikasikan menjadi pesawat tanpa awak sebagai sarana penunjang kebutuhan
transportasi udara pada bidang militer. Dalam kinerjanya twin rotor membutuhkan suatu
pengendali dengan tujuan agar dapat berjalan sesuai dengan posisi sudut yang diharapkan. Penelitian ini
bertujuan untuk menciptakan sebuah solusi permasalahan terhadap keseimbangan pada saat twin rotor
dioperasikan dengan cara memanfaatkan metode optimasi genetic algorithm untuk mengurangi adanya
overshoot hingga mempercepat waktu kinerja respon untuk mencapai suatu posisi sudut yang di inginkan. Ada 3 tahapan penting pada metode optimasi genetic algorithm ini untuk memperoleh nilai Kp, Ki, Kd
yang optimal, diantaranya terdapat selection, crossover, mutation.
Pendahuluan[Kembali]
Unmanned Aerial Vehicle (UAV)
merupakan salah satu bentuk pengembangan pada dunia
penerbangan, dimana pengembangannya berada pada
sistem pengendaliannya yang dapat dioperasikan dari
jarak jauh dan tanpa membutuhkan pilot untuk
menerbangkannya. Tipe multicopter yang terdapat pada UAV
dengan sistem vertical take-off landing dalam sikap
terbangnya ada sebuah permasalahan keseimbangan
ketika terbang, apabila beban motor yang ada pada
mulicopter tidak seimbang. Hal itu sangat
mempengaruhi stabilitas multicopter yang beroperasi
dengan 2 buah baling-baling di samping kanan dan kiri,
dan bisa jadi menimbulkan jatuhnya multicopter pada
saat beroperasi di udara. Maka dari itu dibutuhkan
sebuah sistem pengendalian untuk mengendalikan
bagian rotor motor, dan juga propeller. Berdasarkan dari berbagai permasalahan
keseimbangan yang ada pada pesawat tanpa awak, dilakukan sebuah percobaan
menggunakan alat self-balancing yang memiliki twin
rotor di bagian kanan dan kiri secara horizontal.
Metode Penelitian[Kembali]
a. Pemodelan Dinamik Twin Rotor
Pada saat twin rotor bekerja, terdapat
permasalahan keseimbangan yang disebabkan oleh
kecepatan twin rotor sehingga mengakibatkan
perubahan arah sudut secara tidak teratur. Menimbang
adanya permasalahan tersbut, maka diperlukan
pengendalian pada twin rotor sehingga mampu untuk
menjaga keseimbangan, perubahan arah sudut yang
teratur, dan dapat meningkatkan respon secara halus

bb. Model Plant
P Pada pemodelan sistem ini penulis memakai metode
newton, dimana metode ini dapat menganalisa
hubungan antara persamaan gaya yang bekerja pada
suatu benda dan torsi yang akan di implementasikan
pada sistem. Diasumsikan bahwa massa total balok
terpusat pada masing-masing sisi balok secara
horizontal. M1 dan M2 merupakan jumlah motor massa
dan massa yang terpusat pada masing-masing sisi balok.
B, j dan L merupakan koefisien redaman, moment
inersia dan setengah gambar balok. Berdasarkan
Gambar 2 dapat kita tuliskan persamaan :

c. Motor DC Brushless
Motor brushless DC merupakan motor arus searah yang
juga termasuk dalam jenis motor sinkron dimana motor
ini tidak menggunakan brush (sikat arang) untuk proses
komutasi seperti yang terdapat pada motor DC
konvensional. Pada motor
brushless DC ini terdapat 2 jenis, yaitu trapezoidal dan
sinusoidal. Perbedaan dari kedua jenis motor tersebut
terdapat pada torsi, dimana jenis sinusoidal
menghasilkan torsi elektromagnetik yang lebih datar
daripada trapezoidal.
d. Kontroller PID
Kontroller PID merupakan kombinasi pengontrol
proporsional, integral, dan derivative yang berfungsi
sebagai sistem pengendali dimana kontroller ini bekerja
untuk mendeteksi nilai error melalu feedback (umpan
balik) dengan tujuan memperoleh respon yang baik.

Pada saat menentukan desain pengendali PID berbasis GA, populasi awal yang dihasilkan secara acak melalui string biner dimana string mewakili nilai Kp,Ki,Kd.

a. Selection
Tahap ini merupakan pemilihan suatu populasi
dimana mempertahankan individu terbaik dalam sau
generasi yang tidak berubah pada generasi
berikutnya. Populasi diurutkan berdasarkan fitness
function yang baik. Tiap individu yang memiliki
angka yang baik, berpeluang untuk direproduksi.
b. Crossover
Pada bagian ini terdapat proses rekombinasi
untuk menghasilkan individu yang lebih baik. Disisi
lain keberagaman kromosom dipertahankan hingga
menuju proses mutasi dengan cara bertukar antara 2
kromosom.
c. Mutation
Pada akhir proses ini sebagai tempat penerimaan
keberagaman kromosom yang kemudian dilakukan
pergantian gen dari nol ke satu / satu ke nol dengan
titik mutasi yang ditentukan secara acak. Hasilnya
disebut sebagai turunan baru yang nantinya diuji
pada fitness function untuk melihat kualitas populasi
baru.
Metode
1. Rancangan Penelitian


3. Rancang Bangun Hardware
 Input
(setpoint) berupa posisi sudut yang kemudian
dikendalikan melalui kontroller PID tuning Genetic
Algorithm sehingga membuat Motor DC brushless
bergerak untuk menyesuaikan keseimbangan plant agar
sesuai dengan posisi sudut yang dimasukkan.
Sedangkan sensor MPU 6050 berfungsi untuk mengirim
sinyal umpan balik berupa posisi sudut secara
berkelanjutan sehingga menghasilkan titik
keseimbangan yang optimal dan sesuai dengan setpoint.
Input
(setpoint) berupa posisi sudut yang kemudian
dikendalikan melalui kontroller PID tuning Genetic
Algorithm sehingga membuat Motor DC brushless
bergerak untuk menyesuaikan keseimbangan plant agar
sesuai dengan posisi sudut yang dimasukkan.
Sedangkan sensor MPU 6050 berfungsi untuk mengirim
sinyal umpan balik berupa posisi sudut secara
berkelanjutan sehingga menghasilkan titik
keseimbangan yang optimal dan sesuai dengan setpoint.



Hasil dan Pembahasan[Kembali]
Pengujian dan analisa berkaitan dengan respon sistem
saat simulasi dijalankan melalui diagram block close
loop pada Simulink

Pengujian kali ini membutuhkan beberapa kali
percobaan hingga mencapai 3 iterasi untuk
menghasilkan nilai Kp,Ki,Kd yang optimal. Nilai yang
didapatkan diantaranya Kp = 1.069, Ki = 0.668, Kd =
0.565. Ketika nilai Kp, Ki, Kd sudah ditentukan maka
langkah selanjutnya melakukan proses simulasi pada
fitur Simulink untuk menguji dan menganalisa respon
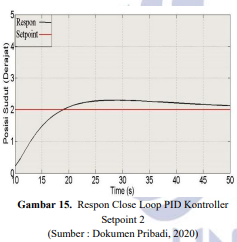
sistem. Simulasi dilakukan sebanyak 4 kali dengan
menggunakan nilai setpoint 1,2,3,4 untuk
membandingkan respon sistem yang optimal. Berikut
dibawah ini merupakan hasil dari simulasi yang akan
ditunjukkan pada gambar 13, 14, 15, 16, 17 :
Hasil respon tanpa kontroller menggunakan
sistem lup terbuka dan nilai input (setpoint) 1
menunjukkan bahwa respon mengalami overshoot
sehingga tidak dapat berjalan secara stabil sesuai
dengan masukkan yang di ingkinkan.



Adanya perbedaan
pada waktu delay di sistem open loop dan close loop
dikarenakan tidak adanya kontroller yang
mengendalikan sistem openloop. Sedangkan respon
tercepat untuk mencapai keseimbangan ada pada
setpoint 1. Pengujian ini membuktikan bahwa dengan
adanya metode optimasi Genetic Algorithm dapat
mengurangi dengan nilai optimal kontroller yang
dimasukkan adalah Kp = 1.069, Ki = 0.668, Kd = 0.565.
Hal tersebut dibuktikan pada tabel 2, tentang hasil
perbandingan 3 metode pada penelitian sebelumnya
dengan metode Genetic Algorithm, dimana pada metode
ini nilai Mp diperoleh sebesar 1.14 % dan lebih kecil
daripada metode Fuzzy dan PID tuning Ziegler Nichols

Kesimpulan[Kembali]
Metode optimasi Genetic Algorithm mampu
menghasilkan nilai yang optimal pada kontroller PID,
diantaranya Kp = 1.069, Ki = 0.668, Kd = 0.565.
Metode optimasi Genetic Algorithm dapat
mengurangi adanya nilai maximum peak, mampu
mempercepat pergerakan Twin Rotor pada Self
Balancing dalam mencapai posisi sudut (setpoint) yang
di inginkan. Hal tersebut dibuktikan dengan grafik hasil
simulasi dan analisis respon dengan nilai ts = 0.0013 s,
td = 0.0004 s, tr = 0.0019 s, ess = 0.042, Mp = 1.14%
yang terjadi pada angka setpoint 1.
Saran
Mengaplikasikan
proses pembelajaran pada saat perkuliahan tentang
metode optimasi, dengan mencari nilai Kp, Ki, Kd
menggunakan metode optimasi PSO, Firefly Algorithm
agar hasil respon yang dihasilkan Twin Rotor pada Self
Balancing semakin baik.
Daftar Pustaka[Kembali]
- Agarwal, Shlok, Apoorva Mohan dan Kamlesh Kumar. 2013. “Design And Fabrication Of Twinrotor UAV”. India. Department of Mechatronics, Manipal University.
- Dharmawan, Andi, Sani Pramudita. 2015. “Penerapan Sistem Kendali PID untuk Kestabilan Twin Tilt rotor dengan Metode DCM”. Jurusan Ilmu Komputer dan Elektronika, FMIPA UGM
- Fajar, Muhammad. 2017. “Perancangan Auto Pilot Lateral-Direksional Pesawat Nirawak LSU-05”, Lembaga Penerbangan dan Antariksa Nasional, Fakultas Teknik Mesin dan Dirgantara, Jurnal Teknologi Dirgantara Vol.15, No.2
- Firman, Beny. 2016. “Implementasi Sensor Imu Mpu6050 Berbasis Serial I2c Pada Self-Balancing Robot”. Jurusan Teknik Elektro, Institut Sains & Teknologi AKPRIND Yogyakarta.
Video Percobaan[Kembali]
Link Download[Kembali]


Tidak ada komentar:
Posting Komentar